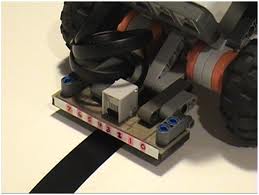
Importer dans votre workspace ce projet eclipse et compléter l'application pour réaliser un suivi de trajectoire en temps réel basé sur l'algorithme ci-dessous. Penser à réaliser en amont un calibrage du capteur à l'aide du programme Calibrage.java.
|
// déclaration int result; int vm = 200; int a = vm; int v1 = vm + a; int v2 = vm - a/3; int v3 = vm + 3*a; int v4 = vm - (4/5)*a; // un algorithme de suivi de ligne result = suiveur.getResult(); switch(result & 0x3C) { case 0x30 : A.setSpeed(v4);C.setSpeed(v3); A.forward();C.forward();break; case 0x38 : A.setSpeed(v4);C.setSpeed(v3); A.forward();C.forward();break; case 0x20 : A.setSpeed(v2);C.setSpeed(v1); A.forward();C.forward();break; case 0x0C : A.setSpeed(v3);C.setSpeed(v4); A.forward();C.forward();break; case 0x1C : A.setSpeed(v3);C.setSpeed(v4); A.forward();C.forward();break; case 0x04 : A.setSpeed(v1);C.setSpeed(v2); A.forward();C.forward();break; case 0 : A.setSpeed(0); A.stop(); C.setSpeed(0); C.stop(); break; default:A.setSpeed(vm);C.setSpeed(vm); A.forward();C.forward();break; } |
|
UltrasonicSensor ultraSonicSensor = new UltrasonicSensor(SensorPort.S2); // utilisation : lecture de la distance de l'obstacle int distance
= us.getDistance(); |
|
//Déclaration TouchSensor touchSensor = new TouchSensor(SensorPort.S3); // Utilisation : détenction d'un appui.if (touchSensor.isPressed()) System.out.println("un appui sur le capteur de contact !"); |
Modifier votre programme pour intégrer cette nouvelle fonctionnalité dans le véhicule.