TP Driver de communications CAN sous RTAI
Le Poly de cours
Travail à réaliser
Le but de ce TP est de réaliser et valider les primitives de
communications d'accès à un bus CAN sous un
environnement de développement temps réel Linux RTAI.
- Lire complètement ce document avant de commencer les
développements. Il vous donne toutes les informations utiles
à la réalisation de ce TP.
- Ecrire un module RTAI réalisant l'envoi périodique d'un
message sur le bus CAN.
- Ecrire une fonction qui affiche dans la console les
paramètres d'un
message reçu sur le CAN. Pour détecter l'arrivée
d'un message, on
réalisera une scrutation périodique du bit de
réception du SJA 1000 qui gère les communications CAN.
- Idem question précédente, mais cette fois le
sja1000 devra déclencher une interruption à
l'arrivée d'un message.
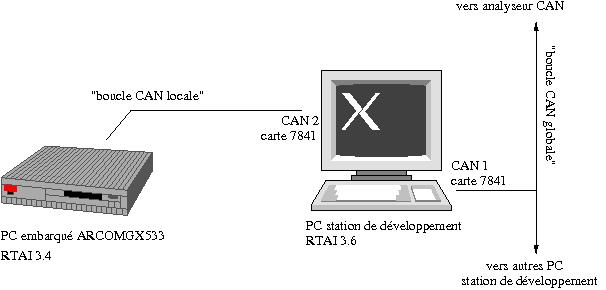
Architecture Matérielle
Chaque groupe disposera sur sa table du
matériel suivant : une station de développement de type
PC sous Linux RTAI, un PC embarqué sous Linux RTAI. Ces 2
calculateurs sont reliés entre eux par un bus CAN via une carte
de communication CAN (boucle locale) . Une boucle CAN globale
relie l'ensemble des stations de développement. Sur cette boucle globale
est
aussi connecté un analyseur CAN.
- Station de
développement : elle est composée d'un
PC de bureau relié à une connexion Ethernet.
L'environnement de travail est Linux
RTAI 4. Il dispose d'une carte de communication CAN ADLINK
7841
PCI.
- PC embarqué :
C'est une carte ARCOM SBCGX533 qui dispose d'une connexion Ethernet,
mais ni écran ni clavier. L'OS
installé sur la carte est Linux
RTAI 3.4. Les
programmes seront développés et compilés sur la
station de travail et téléchargés sur la carte via
la connexion ethernet. Une carte AIM104 CAN est connectée
à cette carte.
- carte communication
CAN ADLINK 7841 PCI
- Cette carte intègre 2
SJA1000 afin de fournir 2 connexions CAN indépendantes.
- Identification de la carte sur le bus PCI : VENDOR_ID =
0x144A, DEVICE_ID = 0x7841
- Vitesse de transmission : 125Kb/s, Determination of bit
timing parameters SJA1000_BT.ps
- manuelPCI7841.pdf
- Data Sheet SJA1000.pdf
- carte communication CAN
AIMPC104
- Cette carte intègre 1
SJA1000.
- Cette
carte connectée au bus PC104 de la carte embarquée est directement
mappée dans la mémoire I/O de la carte ARCOMGX533. Le SJA1000 est
accessible à l'adresse 0x180 et génère des intérruptions sur l'IRQ 5
- Vitesse de transmission : 125Kb/s, determination of bit
timing parameters SJA1000_BT.ps
- manuelAIM104.pdf
- Data Sheet SJA1000.pdf
Architecture logicielle
Tous les développement seront effectués sur la station de
développement sur laquelle est installé un OS LINUX RTAI 4. La carte PC
embarquée est gérée par un OS
Linux
RTAI 3.4. Elle ne dispose pas d'outils de compilation. Les
compilations
seront effectuées par le compilateur gcc qui permettra de
compiler du code pour RTAI3.4 ou RTAI 4.
Le comportement de RTAI3.4 et RTAI 4 étant identiques,
certains
modules pourront être compilés et testés sur la
station de travail. Après validation ils seront
recompilés pour la carte PC embarqué sur laquelle ils
seront
chargés via Ethernet et executés.
- RTAI 3.4. (carte PC
embarqué) :
- Le nom de réseau de la carte est arcom#@esiee.fr ou #
est le numéro inscrit sur le connecteur
ethernet de la carte.
- Makefile34 pour
compiler sur la station un module pour RTAI 3.4, il peut aussi
être utilisé pour envoyer les modules compilés sur
la cible.
- transfert de fichiers entre la machine
développement et le PC embarqué :
- scp fichier_a_transferer
arcom@nom_machine.esiee.fr:/home/arcom
- il est possible de se logger à distance sur la carte
embarquée :
- ouvrir une fenêtre console
- ssh arcom@nom_machine.esiee.fr
- login : arcom password
arcom,
- le chargement des modules peut se faire classiquement avec la
commande insmod ou à
l'aide du script runarcom
- RTAI 4 (station de
développment)
- login: rtai password: rtai
- Makefile4
pour
compiler un module RTAI 4
- le chargement des modules peut se faire à l'aide du
script runPC
- Le
compte
RTAI étant utilisé par tout le monde, archivez vos
sources sur votre compte à la fin de chaque séance.
Utilisez pour cela la commande : scp
fichier mon_login@acme1.esiee.fr:~mon_login/
- Fichier
archive :
- créer
un fichier archive : tar -zcvf
nom_fichier.tgz
repertoire_a_archiver/
- décompresser
un
fichier archive : tar -zxvf
fichier.tgz
Gestion d'interruptions sous RTAI
La gestion des interruptions sous RTAI se fait très simplement
à l'aide de quelques fonctions.
- Include : #include
<asm/irq.h>
- Description du gestionnaire d'interruption:
void mon_gestionnaire(void)
{
...
rt_ack_irq(num_irq);/* acquittement de
l'interruption */
}
- Installation du Handler d'interruption dans le init_module:
rt_global_cli();
/*
desactivation des IT */
rt_request_global_irq(num_irq,mon_gestionnaire);
/*installation
du handler */
/* sur l'IT num_irq
*/
rt_startup_irq(num_irq); /*
activation de la ligne d'interruption */
rt_global_sti(); /* re-activation des IT */
- Désinstallation du handler d'interruption dans le
cleanup_module :
rt_shutdown_irq(num_irq);/*
désactivation
de l'IT num_irq */
rt_free_global_irq(num_irq); /*
désintallation du handler */
Si vous le désirez, vous trouverez des informations
complémentaires dans la documentation RTAI, ou dans le Linux_Device_Driver.pdf
Gestion des E/S sous RTAI
Pour écrire et lire dans des zones mémoires
allouées à des périphériques, il est
nécessaire d'utiliser des fonctions spécifiques. Sous
RTAI on pourra utiliser les fonctions suivantes :
- outb(value,address)
: écriture de value (byte =
8bits) à address
- value=inb(address)
: retourne l'octet contenu
à address
- outw(value,address) : identique à outb mais on
écrit un mot 16bits
- value=inw(address) : identique à inb mais retourne un mot
16bits.
Toutes ces fonctions sont documentées dans
linux_device_driver.pdf
Copie de zone mémoire
Il est parfois utile de copier une zone mémoire dans une autre
zone mémoire. Sous Linux il existe pour réaliser cette
opération la fonction memcpy(&dest,&source,taille)
: dest est l'adresse
de la zone destination, source l'adresse
de
la zone source, et taille
le nombre d'octets à transférer.
Gestion de la carte CAN ADLINK 7841 PCI sous RTAI
- La carte CAN est connectée au bus PCI. Sur ce type de
bus, l'adresse des cartes et les lignes d'interruptions sont
fixées au boot par le bios. Pour pouvoir accéder à
la carte il faut tout d'abord "interroger" le bus PCI pour
récuperer l'adresse de la carte et la ligne d'irq
attribuée. Cette interrogation se fait à partir
d'identifier de la carte qui sont le VENDOR_ID =
0x144A et le DEVICE_ID = 0x7841. Lors
de
ce TP cette procédure vous est déjà fournie
dans le fichier squelette de votre application.
- On utilisera le CAN à un débit de 125Kb/s : BTR0
= 0x03 et BTR1=0x1c. Le output
control register sera initialisé à 0xFA.
- Le CAN 0 (boucle globale) est accessible à l'adresse de
base de la carte CAN.
- Le CAN 1 (boucle locale) est accessible à l'adresse de base+0x80
.
Fichiers Fournis
L'archive tpcan.tgz
contient tous les
fichiers
utiles pour
réaliser ce TP . Sur ce 1er TP les développements se feront fait sur le
PC sous RTAI 4 avec la carte CAN 7841 sur la "boucle CAN globale"
afin de permettre une validation avec l'analyseur logique. Ainsi seuls
les fichiers du répertoire PC seront utilies pour ce TP.
- répertoire
PC/
- squelette_7841.c: Ce fichier est
la
base de votre module de communication CAN, a vous de le completer.
- Makefile4
: ce makefile est à
utiliser si vous voulez
compiler un module pour RTAI 4. Il doit être
édité :
- obj-m
:= module1_a_compiler.o
module2_a_compiler.o ...
- Pour compiler, renommez le Makefile4 en Makefile et utiliser la
commande make
- runPC :
chargement et déchargement des
modules sur le
poste de développement.
- ./runPC
mon_module chargera les principaux modules rtai et
le module mon_module.ko
- répertoire
test_can_7841/ : ce
répertoire
contient les modules pré-compilés de gestion de la carte can
7841 afin de vous permettre, en cas de doute, de vérifier que la
carte
CAN fonctionne correctement et est bien reliée au bus CAN. Ces
modules
utilisent le CAN à 125Kb/s.
- ./runtest
test_CAN_recv lancera les modules de test pour la
réception. La commande dmesg
vous permettra de visualiser les informations sur les messages
reçus.
- ./runtest
test_CAN_send lancera les modules de test pour
l'envoi. Une trame CAN est envoyée périodiquement.
- répertoire
ARCOMGX533/
- Makefile34
: ce makefile est a utiliser
si vous voulez compiler
un module pour RTAI 3.4 (carte ARCOM GX533).
- Il doit être édité :
- KIT = arcom#@esiee.fr
: remplacez le # par le
numéro de la carte.
- obj-m
:= module1_a_compiler.o
module2_a_compiler.o ...: spécifie la
liste des modules à compiler.
- Pour compiler il vaut mieux le renommer en Makefile et lancer la
commande: make
- Pour envoyer les modules compilés sur la carte ARCOMGX533 : make send
- Pour supprimer les modules compilés : make
clean
- runarcom
: script permettant de charger et
décharger les
modules sous RTAI 3.4 : ./runarcom
mon_module_a_charger (Cette commande est à exécuter sur le PC
embarqué).
- 3712.h : fichier header gestion de
la carte conversion numérique/analogique 3712
- 3712.ko: module gestion carte
conversion numérique/analogique
3712
- squelette_tp2.c : squelette du tp2
- répertoire
test_CAN_AIM104/:
ce
répertoire contient les modules pré-compilés de gestion de la
carte can
AIMCANPC104 afin de vous permettre, en cas de doute, de
vérifier
que la carte CAN
fonctionne correctement et est bien reliée au bus CAN. Ces
modules
utilisent le CAN à 125Kb/s. L'ensemble de ces fichiers doit être
copié
sur la carte ARCOMGX533. Les commandes suivantes pourront alors
être
exécutées sur la carte ARCOMGX533.
- ./runtestarcom
test_aim104can_recv lancera les modules de test pour
la réception. La commande dmesg
vous permettra de visualiser les informations sur les messages
reçus.
- ./runtestarcom
test_aim104can_send lancera les modules de test pour
l'envoi. Une trame CAN est envoyée périodiquement.
BON COURAGE !!