Etude de CAS- Majeure Systèmes
Embarqués
Etude d'un système de
contrôle réparti
Présentation
L'objectif de cette étude est de parcourir l'ensemble d'un cycle
de développement d'un système embarquable réparti
et temps réel, de l'analyse à la réalisation d'un
prototype opérationnel.
Le système retenu intègrera au final :
- des procédés réels à commander,
- leurs interfaces électroniques,
- éventuellement des procédés simulés
à
commander,
- plusieurs processeurs assurant différentes
fonctionnalités
(acquisition, conversion de commande, contrôleur, IHM, journal de
trace ...),
- des réseaux de communication entre ces processeurs.
Durant l'étude de cas, nous nous attacherons à d'abord
établir
des modèles fonctionnels et à en simuler le comportement
avant de passer à la réalisation. Tout
élément
devra être testé et validé.
Procédé
L'objectif est d'étudier la commande de plusieurs
procédés qui pourront être synchronisés.
Ils peuvent être soit physiquement présents, soit
simulés
dans l'architecture :
- 2 pendules inverses coordonnés (physique),
- 2 moteurs coordonnés (physique), soit reliés
physiquement
(laminoir ou chaîne de transmission),
- amortisseurs commandés (2ème ordre simulé)
- ...
Comme application type de référence, on citera la
stabilisation d'un véhicule par une suspension active.
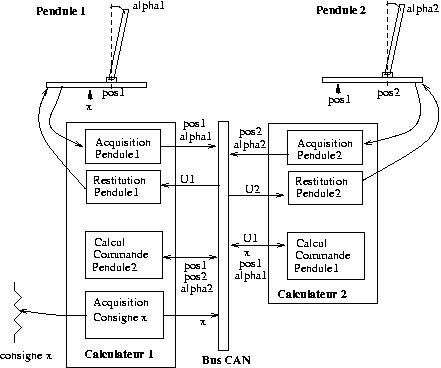
Dans le cadre de cette étude de cas, le système à
développer choisi comporte les
éléments
suivants :
- 2 pendules à contrôler en position x
géographiquement
distants,
- 1 générateur de consigne en position
géographiquement
distant,
- 1 visualisation déportée des états des
éléments
du système.
Déroulement
- Présentation - R.KOCIK transparents
de la présentation
- Synthèse de contrôleurs - A.CELA
- Modélisation des procédés
- Définition et synthèse de contrôleurs
- Définition des intervalles possibles
d'échantillonnage et
de retards.
- Définition des critères de qualité
- Simulation d'une implantation distribuée
Pour mener à bien cette partie vous aurez besoin des fichiers suivant :
- Implantation mono-processeur - R.HAMOUCHE, R.KOCIK
- Extension multi-processeurs - R.HAMOUCHE, R.KOCIK
- Découpage de la loi de commande
- Développement de drivers de communication
- Implantation distribuée temps réel
- Tests et validation avec le procédé
- Intégration du controle du deuxième
procédé
- Comparaison avec les simulations - A.CELA
- Prise en compte, dans les simulations, des
caractéristiques de l'implantation
réalisée
- Comparaison avec les simulation réalisées en 2)
- Comparaison avec le comportement réel
- Conclusion
- Soutenance - A.CELA, R. HAMOUCHE, R.KOCIK
Quelques conseils
- Avant de vous précipiter à l'écriture de vos
modules, lisez les documentations fournies, le temps "perdu" au
départ sera largement récupéré ensuite.
- Développez vos applications de façon modulaire : un
module de gestion des E/S, un module gestion CAN, un module
application. Ainsi la correction d'un bug sur un module profitera
à l'ensemble des applications utilisant ce module.
- Soyez curieux et posez vous des questions : comment marche la
carte ? quelle est la bande passante des convertisseurs A/D?, comment
pourra-t-on la connecter au pendule ? quels sont les avantages et
inconvénients des différentes solutions techniques
enviseagables ?...
- Prenez le temps d'écrire un code propre en utilisant entre
autres le "#define".
- Notez au fur et à mesure les problèmes
rencontrés, les remarques et solutions apportées, il vous
sera plus facile par la suite de rédiger votre rapport.
- Gardez à l'esprit qu'il est plus facile de résoudre
les problèmes un par un plutôt que tous en même
temps : avancez par étapes en séparant bien les
problèmes. Garder vos programmes de test qui vous ont permis de
valider chacunes de ces étapes. En cas de problème , vous
pourrez ainsi vérifier facilement si le matériel est
défectueux où si ce sont les modifications
apportées à votre code qui sont la cause de votre nouveau
bug.
- Progressez pas à pas, en validant très
régulièrement.
- Gardez les versions intermédiaires validées de vos
programmes.
- Rédigez votre rapport au fur et à mesure.
- N'hésitez pas à poser des questions.
- Tirez parti du fait que vous êtes en binome : partagez-vous
le travail pour plus d'efficacité.
- Le matériel mis à
votre disposition est couteux et fragile, prennez en soin :
- NE DEMONTEZ PAS LES KITS
- ne faites pas de branchement
sous tension
- évitez les
débranchements et rebranchements répétés
- validez toujours le
comportement de votre application (allure et cohérence des
signaux) avant d'allumer l'ampli de puissance qui contrôle le
moteur du pendule
- rangez correctement le
matériel en fin de séance, laissez la salle correctement
rangée
Annexes
Architecture Matérielle
Architecture Matérielle
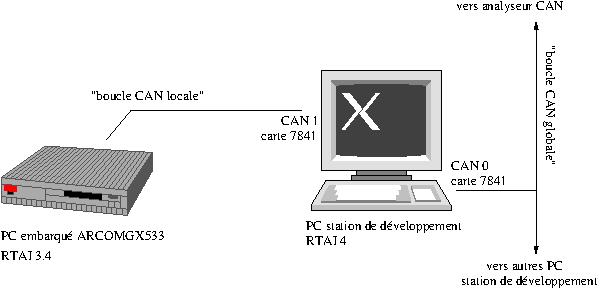
Chaque groupe disposera sur sa table du
matériel suivant : une station de développement de type
PC sous Linux RTAI, un PC embarqué sous Linux RTAI. Ces 2
calculateurs sont reliés entre eux par un bus CAN via une carte
de communication CAN (boucle locale) . Une boucle CAN globale
relie l'ensemble des stations de développement. Sur cette boucle globale est
aussi connecté un analyseur CAN.
- Station de
développement : elle est composée d'un
PC de bureau relié à une connexion Ethernet.
L'environnement de travail est Linux RTAI 4. Il dispose d'une carte de communication CAN ADLINK
7841
PCI.
- PC embarqué :
C'est une carte ARCOM SBCGX533 qui dispose d'une connexion Ethernet, mais ni écran ni clavier. L'OS
installé sur la carte est Linux
RTAI 3.4. Les
programmes seront développés et compilés sur la
station de travail et téléchargés sur la carte via
la connexion ethernet. Une carte AIM104 CAN est connectée
à cette carte.
- carte communication CAN ADLINK 7841 PCI
- Cette carte intègre 2
SJA1000 afin de fournir 2 connexions CAN indépendantes.
- Identification de la carte sur le bus PCI : VENDOR_ID =
0x144A, DEVICE_ID = 0x7841
- Vitesse de transmission : 125Kb/s, Determination of bit
timing parameters SJA1000_BT.ps
- manuelPCI7841.pdf
- Data Sheet SJA1000.pdf
- squelette rtai gestion pci squelette_can_pci_linux.c
- carte communication CAN AIMPC104
- Cette carte intègre 1
SJA1000.
- Cette
carte connectée au bus PC104 de la carte embarquée est directement
mappée dans la mémoire I/O de la carte ARCOMGX533. Le SJA1000 est
accessible à l'adresse 0x180 et génère des intérruptions sur l'IRQ 5
- Vitesse de transmission : 125Kb/s, determination of bit timing parameters SJA1000_BT.ps
- manuelAIM104.pdf
- Data Sheet SJA1000.pdf
- carte Acquisiton ADC
: ADVANTECH 3718HG
PC104
- La carte est configurée avec l'adresse de base 0x320
- PCM-3718H.pdf
- configuration des jumpers :
- Base Address Switch Setting SW1
1 2 3 4 5 6
on X X X
off X X X- DMA channel &timer clock JP1: 1M, DM3
- Channel config JP2 : 16 S.E. inputs
- External input or DIO JP3 : DIO 0
- carte Acquisiton DAC
: ADVANTECH
PCM-3712 PC104
- La carte est configurée avec l'adresse de base 0x300
- PCM-3712.pdf
- configuration des jumpers
- Base Address Switch Setting SW1
1 2 3 4 5 6 7 8
on X X X X X X
off X X - JP11: Asynchronous mode
- Channel 1 (JP1,JP3,JP5) : bipolar +-10v
- Channel 2 (JP2,JP4,JP10) : bipolar +-10V
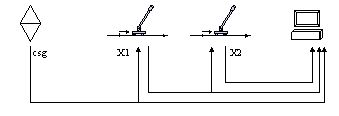
Dans un deuxième temps, lorsque les développement seront avancés, les cartes embarquées seront
connectées par 2 et reliées aux pendules afin de
réaliser plusieurs postes ayant l'architecture suivante :
Les différents groupes devront s'organiser pour valider en
local le logiciel développé, et le tester ensuite
à tour de rôle sur cette architecture.
Architecture logicielle
Tous les développement seront effectués sur la station de
développement sur laquelle est installé un OS LINUX RTAI 4. La carte PC embarquée est gérée par un OS
Linux
RTAI 3.4. Elle ne dispose pas d'outils de compilation. Les
compilations
seront effectuées par le compilateur gcc qui permettra de
compiler du code pour RTAI3.4 ou RTAI4.
Le comportement de RTAI3.4 et RTAI4 étant identiques,
certains
modules pourront être compilés et testés sur la
station de travail. Après validation ils seront
recompilés pour la carte PC embarqué sur laquelle ils
seront
chargés via Ethernet et executés.
- RTAI 3.4. (carte PC embarqué) :
- Le nom de réseau de la carte est arcom#@esiee.fr ou # est le numéro inscrit sur le connecteur
ethernet de la carte.
- Makefile34 pour
compiler sur la station un module pour RTAI 3.4, il peut aussi
être utilisé pour envoyer les modules compilés sur
la cible.
- transfert de fichiers entre la machine
développement et le PC embarqué :
- scp fichier_a_transferer arcom@nom_machine.esiee.fr:/home/arcom
- il est possible de se logger à distance sur la carte
embarquée :
- ouvrir une fenêtre console
- ssh arcom@nom_machine.esiee.fr
- login : arcom password arcom,
- le chargement des modules peut se faire classiquement avec la
commande insmod ou à
l'aide du script runarcom
- RTAI 4 (station de développment)
- login: rtai password: rtai
- la documentation est disponible sous forme html sur votre
machine : voir menu "esiee" de la machine
- Makefile4 pour
compiler un module RTAI 4
- le chargement des modules peut se faire à l'aide du
script runPC
- Le
compte RTAI étant utilisé par tout le monde, archivez vos
sources sur votre compte à la fin de chaque séance. Utilisez pour cela la commande : scp fichier mon_login@acme1.esiee.fr:~mon_login/
- Fichier archive :
- créer un fichier archive : tar -zcvf nom_fichier.tgz
repertoire_a_archiver/
- décompresser
un fichier archive : tar -zxvf
fichier.tgz
Fichiers Fournis
L'archive tpcan.tgz
utilisé l'année dernière en TP CAN contient tous les
fichiers
utiles pour
réaliser ce TP .
- répertoire PC/
- squelette_7841.c: Ce fichier est la
base de votre module de communication CAN, a vous de le completer.
- Makefile4: ce makefile est à
utiliser si vous voulez
compiler un module pour RTAI 4. Il doit être
édité :
- obj-m := module1_a_compiler.o module2_a_compiler.o ...
- Pour compiler vous pouvez utiliser la commande : make -f Makefile4
- runPC : chargement et déchargement des
modules sur le
poste de développement.
- ./runPC mon_module chargera les principaux modules rtai et le module mon_module.ko
- répertoire test_can_7841/ : ce
répertoire contient les modules pré-compilés de gestion de la carte can
7841 afin de vous permettre, en cas de doute, de vérifier que la carte
CAN fonctionne correctement et est bien reliée au bus CAN. Ces modules
utilisent le CAN à 125Kb/s.
- ./runtest test_CAN_recv lancera les modules de test pour la réception. La commande dmesg vous permettra de visualiser les informations sur les messages reçus.
- ./runtest test_CAN_send lancera les modules de test pour l'envoi. Une trame CAN est envoyée périodiquement.
- répertoire ARCOMGX533/
- Makefile34 : ce makefile est a utiliser
si vous voulez compiler
un module pour RTAI 3.4 (carte ARCOM GX533).
- Il doit être édité :
- KIT = arcom#@esiee.fr : remplacez le # par le
numéro de la carte.
- obj-m := module1_a_compiler.o module2_a_compiler.o ...: spécifie la
liste des modules à compiler.
- Pour compiler il vaut mieux le renommer en Makefile et lancer la
commande: make
- Pour envoyer les modules compilés sur la carte ARCOMGX533 : make send
- Pour supprimer les modules compilés : make clean
- runarcom : script permettant de charger et
décharger les
modules sous RTAI 3.4 : ./runarcom
mon_module_a_charger (Cette commande est à exécuter sur le PC embarqué).
- 3712.h : fichier header gestion de la carte conversion numérique/analogique 3712
- 3712.ko: module gestion carte conversion numérique/analogique 3712
- squelette_tp2.c : squelette du tp2
- répertoire test_CAN_AIM104/:
ce
répertoire contient les modules pré-compilés de gestion de la carte can
AIMCANPC104 afin de vous permettre, en cas de doute, de vérifier
que la carte CAN
fonctionne correctement et est bien reliée au bus CAN. Ces modules
utilisent le CAN à 125Kb/s. L'ensemble de ces fichiers doit être copié
sur la carte ARCOMGX533. Les commandes suivantes pourront alors être
exécutées sur la carte ARCOMGX533.
- ./runtestarcom test_aim104can_recv lancera les modules de test pour la réception. La commande dmesg vous permettra de visualiser les informations sur les messages reçus.
- ./runtestarcom test_aim104can_send lancera les modules de test pour l'envoi. Une trame CAN est envoyée périodiquement.
Format des drivers des carte
d'acquisition
-
Module RTAI pour la carte acquisition ADC. Ce module fournira les fonctions
suivantes:
- int
init3718(void) :
initialisation de la carte d'acquisition. Cette fonction sera
appelée dans l'init_module de 3718.o.
Retourne un entier
nul lorsque l'initialisation est correcte.
- void
SetChanel(int in_channel)
: Cette fonction doit positionner le numéro de canal in_channel sur lequel devra
être réalisée une conversion
Analogique-Numérique.
- void ADRangeSelect(int channel,
int range) : sélectionne
la sensibilité (range)
du canal channel
- u16 ReadAD(void) :
réalise la conversion Analogique-Numérique sur le canal
courant et retourne la valeur convertie.
-
Module RTAI pour la carte acquisition DAC. Ce module fournira les fonctions
suivantes:
- int
init3712(void) :
initialisation de la carte d'acquisition. Cette fonction sera
appelée dans l'init_module.
Retourne un entier
nul lorsque l'initialisation est correcte.
- void SetDA(int channel, int
value) : Cette fonction doit positionner la valeur value dans le CNA de la
sortie channel de la carte
Vous n'êtes pas tenu de respecter le format
des
fonctions décrites ici, mais il est nécessaire d'implanter
toutes ces fonctionnalités.
Pour valider ce travail nous mettons à votre
disposition un oscilloscope et
un
générateur BF.
Quelques outils et documents complémentaires :
Rapport
Le jour de la soutenance, un rapport de synthèse doit être
rendu. Ce rapport devra comporter la
réalisation,
l'architecture, les plans de tests, les résultats
obtenus(performances,
gestion du temps ...), les comparaisons, ..., et toute information
nécessaire
pour pouvoir comprendre, refaire, retester, valider
le système.
Les architectures fonctionnelles, matérielles et logicielles
devront
être présentées et argumentées. La
rédaction
devra s'attacher à comparer les solutions candidates, à
expliquer
et à justifier/critiquer/comparer les solutions
développées.
L'ensemble des tests unitaires et d'intégration devront
être
présents et justifiés.
Tout élément bibliographique nécessaire sera joint.
BON COURAGE !!