 Thierry GRANDPIERRE
Thierry GRANDPIERRE
Responsabilités
- Depuis 2018 : Co-Responsable de la filière Cybersécurité ESIEE labélisée ANSSI SecNumEdu
- (resp. Majeure Informatique de l'ESIEE E4 + E5 jusqu'en septembre 2010)
- Salle de réalité virtuelle de l'ESIEE que j'ai créé de toutes pièces
- Plateformes : Serveur de calcul BladeCenter-H, PCs GPUs, etc. avec Eric Llorens
- Texas Instruments Innovation Gateway : un espace innovant dans notre bibliothèque où il est possible d'emprunter du matériel!!
- Relation industriel
- Membre du conseil de perfectionnement de l'ESIEE
Thèmes de recherche
- Méthodologie Adéquation Algorithme Architecture (AAA) pour les
applications temps réel embarquées sur architectures multi-composants (programmables, reconfigurables) ( ma thèse , mon HDR)
- Conception d'architectures dédiées multicomposants (CPU/DSP/FPGA/GPU)
- Extension de la méthodologie AAA aux circuits reconfigurables, (thèse co-encadrée et soutenue : L. Kaouane 2004)
- Extension de la méthodologie AAA aux architectures mixtes (processeur-FPGA) et aux SoC(thèse co-encadrée et soutenue : O. Feki 2015)
- Application à la compression vidéo temps réel sur multi-DSP (thèse co-encadrée et soutenue N. Bahri, 2015)
- Modélisation Optimisation des Architectures Reconfigurables et Programmable CGRA pour le Traitement du signal et des images (thèse co-encadrée et soutenue 2021 : E. Barbudo)
- Développement du logiciel SynDEx-IC (basé sur le noyau SynDEx de l'INRIA) et application au traitement des images
- Système temps réel critiques
- Analyse et ordonnancement d’un système hiérarchique virtualisé composé d’applications temps réel strictes (PikeOS/Sysgo) (thèse co-encadré et soutenue 2021 : T. Fautrel )
- Optimisation réseaux de communications avionique (thèse CIFRE SAFRAN en cours 2024 : F. Champenois), Brevet
- Projet FUI Drones : CEOS (Thales, Alerion, Univ. Nancy, INRIA,ESIEE)
- Système temps réel souples
- Implémentation GPU d'opérateurs originaux de traitements d'images pour l'IA (thèse en cours 2024 : Q. Lebon)
- Projet Impulsion de l'I-Site "Urbanvision" (Reconstruction automatique de Scènes 3D pour la simulation en réalité virtuelle) FUTURE
- Système dédié pour la réalité augmentée + brevet pour un système d'aide à la radiologie interventioniste avec une équipe du CHU Henri Mondor
- Axe réalité augmenté du projet ExcellenCES CITYFAB dans le cadre de « France 2030 »
Publications HAL,
Academia,
Linkedin,
ResearchGate.
Membre des GDR (Groupement de recherche du CNRS)
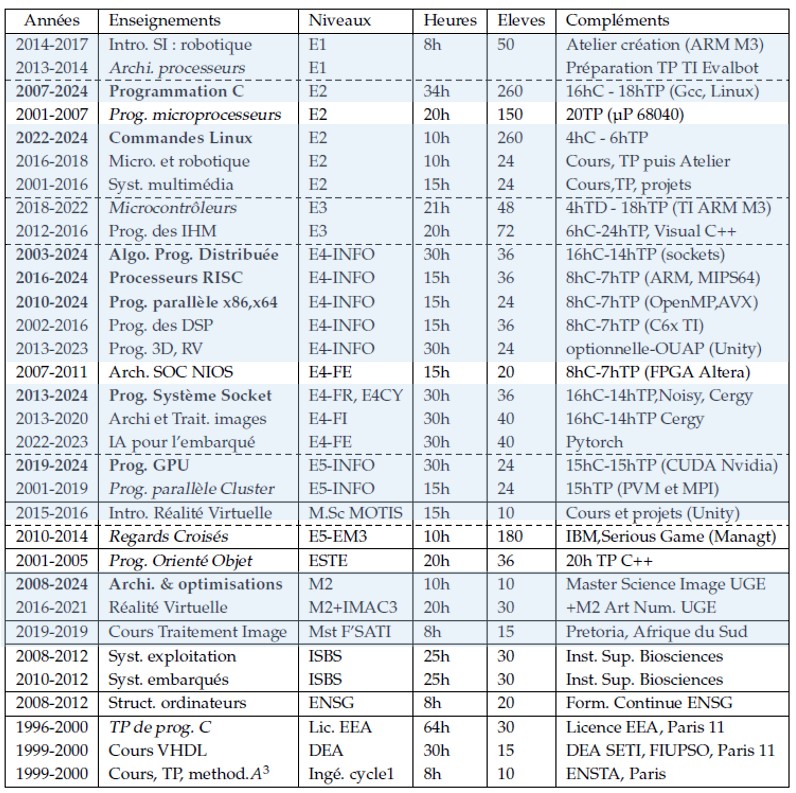
Principaux enseignements (par ordre de niveau académique croissants, en italique ceux qui n'ont pas été donnés en 2019-2020)
- Tableau exhaustif de l'ensemble des enseignements dispensés de 1999 à 2024
- Quelques exemples actuellement :
- Architecture des processeurs RISC, filière Informatique E4 : Pipeline, jeux d'instruction ASM, MIPS64, application en traitement des images
- Programmation en C : niveau E2 (équiv. L2), env. 300 étudiants(!). Environnement Linux + gcc. + cours ligne de commande
- Programmation des microcontroleurs sur ARM MSP432 de Texas Instrument [TD+TP 18h], niveau E3 (équiv. L3). Environnement Code Composer Studio (Texas Instruments), programmation bas niveau (sans HAL) des GPIO, Timer/PWM, UART...
- Programmation multicoeurs et SIMD filière informatique E4 (équiv. M1) et en Master 2 Science de l'Image : OpenMP, SIMD (SSE4/AVX/LEON).
- Architecture et Programmation GPU (CUDA) filière informarique E5 (équiv. M2) : programmation CUDA (cibles PC + embarqués Jetson TX2, intro. à OpenCL.
- Programmation système des communications sockets filière informatique E4 (équiv. M1) et filière apprentissage réseaux E4FR.
- Introduction aux Sciences de l'ingénieur : Robotique, niveau E1 (équiv. L1) : découverte de la robotique en construisant un robot mobile + programmation graphique Ardublock + Energia adapté de Arduino pour les cartes MSP432P401R de Texas Instrument .
- Introduction aux réseaux [TP 8h], niveau E3 (équiv. L3). Configuration Firewall/ipchains, configuration routeurs Cisco.
- Systèmes distribués,filière informatique E4 (équiv. M1). Modélisation système, algorithmique distribuée/horloges Lamport,...
- Introduction au traitement des images, filière apprentissage Informatique et Applications E3 (équiv. M1) : structure informatique, techno. des capteurs (demosaicing), traitements bas niveau,histo.,filtrage, convolution, détection contours (Sobel, Canny-Deriche), PoI (Harris), Utilisation de OpenCV.
- Programmation parallèle avec PWM (~MPI) [TP 8h], filière informatique E5 (équiv. M2).
- Technologies en Réalité Virtuelle et Augmentée, Master 2 Science de l'Image + IMAC 3ème année + Mastère 1 en Art Numériques et Cultures Visuelles.
- Structure interne des ordinateurs, Formation continue à l'ENSG/IGN]
- Encadrements + support de projet de tous niveaux : bac+3 (E3), bac+4 (E4), bac+5 (E5)
- Encadrement de stage ingénieurs ESIEE E4, E5. Stages M2.
Supports de cours, TD et TP :
- depuis 2015 : sur icampus/moodle et sur sur blackboard :
-
2014-2015,
2012-2013,
2012-2013 + ,
unités d'ouvertures E5
2011-2012,
2010-2011,
2009-2010,
2008-2009,
2007-2008,
2006-2007,
2005-2006,
2001-2005.
Projets élèves
Quelques exemples de projets proposés et encadrés (
galerie de projets élèves en réalité virtuelle, robotique, traitement des images...) :
- Géolocalisation Indoor/Outdoor par UWB (Angle Of Arrival AoA) - Module SR150/040 NxP et MCU MCXA153 NxP (projet E3)
- Détection d'obstacles / Cartographie par module radar TI mmWave IWRL6432 57GHz pour la robotique (projet E4)
- Chasse aux trèsors sur casque de réalité augmentée Hololens pour musée
- Adaptation de l'autopilote PX4 pour cartes STM32MP157 à coeurs hétérogènes [Projet fil rouge filière apprentissage Electronique Embarquée 5ème année M2]
- Développement d'un outil de réalité augmenté (sur casque de réalité augmentée Hololens 2) pour l'aide à la radiologie interventioniste (Brevet en cours avec CHU APHP Henri Mondor) - [Stage M2]
- Implémentation de la BRDF mesurée pour la simulation de conduite en réalité virtuelle avec Unity [Stage M2]
- Géolocalisation indoor basée sur les E/R DecaWave DWM1000 UltraWideBand, [stage international M2]
- Attérissage automatique pour Drone basé sur le traitement d'images [stage international M2]
- Etude et développement d'un scanner 3D basé LIDAR à faible cout [Projet fil rouge filière apprentissage Electronique Embarquée 5ème année - M2]
- Développement du calculateur du Drone CEOS - Utilisation du RTOS PikeOS sur cible LS1046 NxP (Quadcore Cortex A72), interfacage avec Jetson Tegra TX2, communications SDR basé B210 [Stage M2]
- Communications temps réel basées AVB TSN / PTP IEEE1588 / Xenomai RTNET / sur PC [Stage M2 international 2016]
- Développement d'une application interactive associant le système à retour d'effort ultra-sons "Ultrahaptic" avec un Hololens [Projet E4]
- Extension du système de chiffrement "Wookey" de l'ANSSI sur cible STM32F4 [Projet E4]
- Reconstruction 3D de scènes par photogrammetrie, importation dans Unity [Projet E4]
- IoT pour l'Apiculture [Projet E4]
- Visite virtuelle des Salles Blanches avec UE4 de l'ESIEE pour simulation immersive (Occulus, HTC Vive, salle immersive, dataglove...) [Projet E3]
- Développement d'une voiture autonome pour la NxP Cup, dév. d'un Cours dédié à nase de ARM NxP KL25Z [Projet E3]
- Modélisation et visite virtuelle de l'hôtel Sully sous Unity [Projet E3]
- Interface Kinect, Casque Immersif 3D, Réalité Virtuelle et Augmentée [Projet E3]
- Gant de données, Fauteuil roulant pour la salle de RV [Projet E3]
- Viewer 3D de données médicale, stéréoscopie(IRCAD)
- Detection d'horizon embarqué pour Drone (projet CNES/Perseus)
Tuto et infos utiles
- MACOS & GCC : il suffit d'installer xcode. Ensuite dans un terminal vous avez la commande gcc
- Linux sur PC Windows :
- Linux dans une machine virtuelle grace à Virtual Box : la solution la plus complète mais requiert un PC puissant et de l'espace disque
- Linux sur une clef USB Linux sans rien installer sur le PC : téléchargez
"PenDrive Linux installer" comme indiqué puis sélectionner la version
linux que vous souhaitez installer (cochez bien download the iso) puis
suivez les instructions affichées. L'inconvénient est qu'il faut
toujours avoir la clef ou le CD dans le lecteur (pensez à modifier le
BIOS pour que le PC soit capable de booter sur CD ou sur clef). C'est donc un peu lent à démarrer et vous
êtes limité pour sauvegarder votre travail.L'avantage, c'est que rien
est installé sur le disque, vous avez accès à une distribution Linux
assez complète.
- Environnement de compilation GCC/Linux sous windows grace à Cygwin : ce n'est pas un vrai linux mais cela prend peu de place et tourne sur un PC peu puissant. Permet de fabriquer des exécutables windows sans passer par visual studio.
- Des outils (multi-plateformes Win/Linux/Mac/Android) très pratiques :
Port serie (RS232) : lire le port serie sous windows: un très bon résumé est donné ici (et en copie locale ici). Voir aussi dans les enseignements l'unité IN213.
Evalbot l3s9b92 assembler (pwm motors!) programming asm,
Programmation
Cortex M3 M4 Evalbot (moteurs pwm!) l3s9b92 en assembleur
"Howto" pour capitaliser le travail effectué sur la NxP Cup (ex Freescale Cup) depuis 2013
"Howto" pour utiliser les cartes de dev. Freescale
¨Potree (et non ce n'est pas de la poterie mais des nuages de points (cloud points tree)
autre infos utiles : OLD RC car schematics,
{kind=link}
{kind=link}