2.2. Objective function#
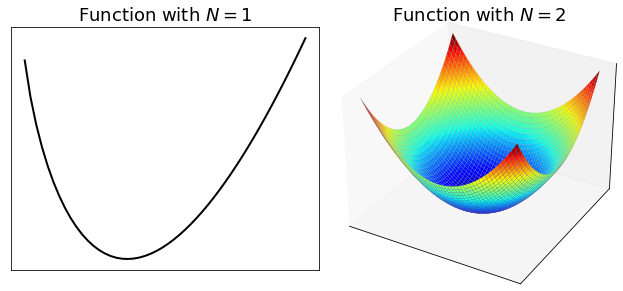
The function to be minimized or maximized in an optimization problem is called objective function, cost function (only for minimization), or utility function (only for maximization). It is a function from \(\mathbb{R}^N\) to \(\mathbb{R}\) that takes as input \(N\) real numbers, and produces a real number as output. Throughout the course, the objective function will be conventionally denoted as
The domain \(\mathbb{R}^N\) indicates that the function’s “input” is a vector of real variables denoted as
and the codomain \(\mathbb{R}\) indicates that the function’s “output” is a real number denoted as \(J(\bf w)\) or equivalently \(J(w_1, w_2, \dots,w_N)\). The figure below shows two examples of function.
2.2.1. Continuity#
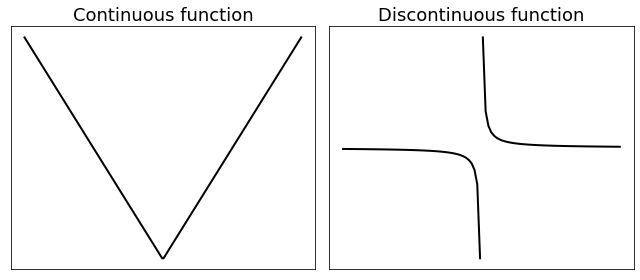
A function is continuous if it does not have any abrupt changes in value. More precisely, a function \(J({\bf w})\) is continuous at some point \(\bar{\bf w}\) of its domain, if the limit of \(J({\bf w})\), as \({\bf w}\) approaches \(\bar{\bf w}\) through the domain of \(J\), exists and is equal to \(J(\bar{\bf w})\).
Continuity
The function (as a whole) is said to be continuous, if it is continuous at every point of its domain. Roughly speaking, a continuous function can be drawn as a single unbroken curve (or surface) over all its domain. A function is said to be discontinuous at some point when it is not continuous there. The figure below shows examples of continuous and discontinuous functions.
2.2.2. Coercivity#
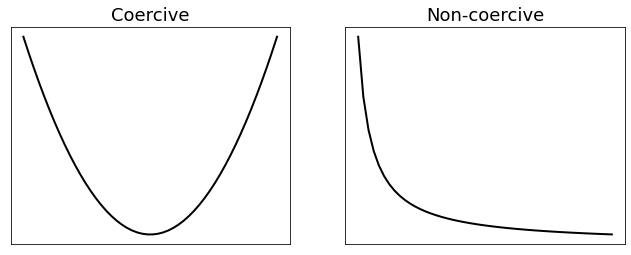
A function is coercive if it grows to infinity at the extremes of the space on which it is defined.
Coercivity
The figure below shows an example of coercive function (left side) and non-coercive function (right side).
2.2.3. Convexity#
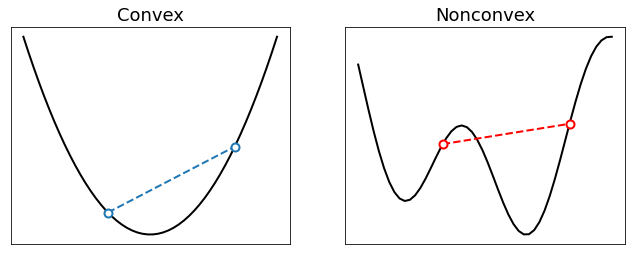
A function is convex if its graph “curves up” without any bend the other way. More precisely, a convex function meets the following inequality
The above definition has a simple geometric interpretation: the segment connecting \(({\bf x}, J({\bf x}))\) to \(({\bf y}, J({\bf y}))\) never goes under the graph of \(J\). See the examples below.
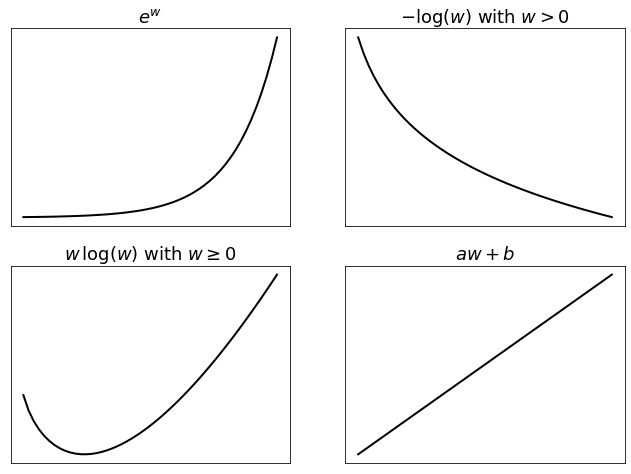
Here are several examples of convex functions.
\(f(w) = e^{w}\)
\(f(w) = |x|^{a}\) with \(a\ge 1\)
\(f(w) = x^{-a}\) over \(\mathbb{R}_{++}\) with \(a\ge0\)
\(f(w) = -\sqrt[a]{x}\) over \(\mathbb{R}_{++}\) with \(a>0\)
\(f(w) = -\log w\) over \(\mathbb{R}_{++}\)
\(f(w) = x\log x\) over \(\mathbb{R}_{+}\) (and \(0\log0=0\) by convention)
\(f({\bf w}) = {\bf c}^\top {\bf w}\)
\(f({\bf w}) = \|A {\bf w} - {\bf b}\|^2\)
\(f({\bf w}) = {\bf w}^\top Q {\bf w}\) provided that \(Q\) is positive semi-definite
\(f({\bf w}) = \|{\bf w}\|_p\) with \(p\ge1\)
\(f({\bf w}) = \max\{w_1,\dots,w_N\}\)
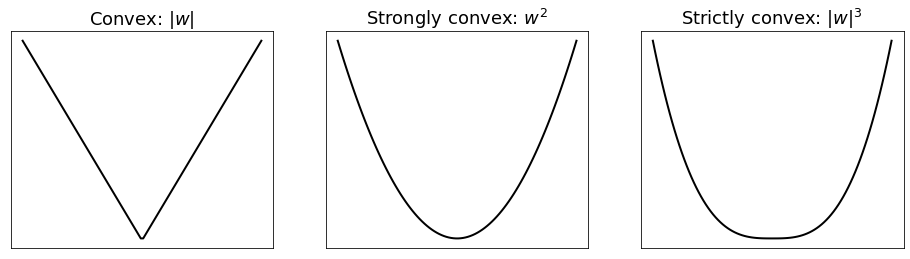
2.2.3.1. Strict convexity#
A convex function is strictly convex if it has greater curvature than a linear function. Such requirement is equivalent to enforce convexity with a strict inequality
Intuitively, the above test fails when a convex function is linear somewhere on its domain. This also includes flat zones, which can only occur at the minimum of convex functions by definition.
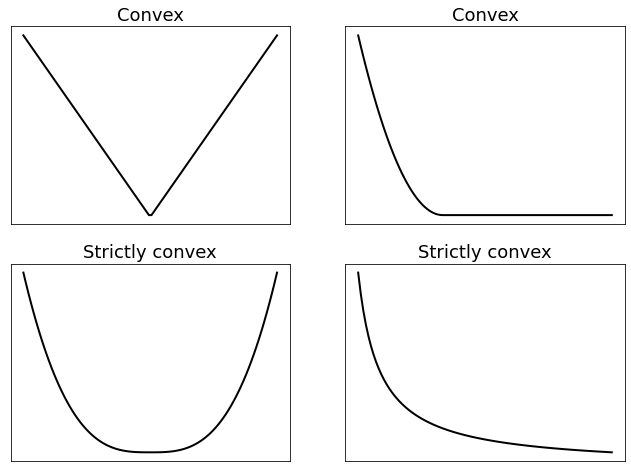
2.2.3.2. Strong convexity#
A convex function is strongly convex if it has at least the same curvature as a quadratic function. This requires the existence of a positive value \(\mu>0\) such that \(J({\bf w}) - \frac{\mu}{2}\|{\bf w}\|^2\) is still convex. Put another way, adding a quadratic term to a convex function makes it strongly convex.
Interestingly, the three types of convexity are related.
Note
Strong convexity \(\Rightarrow\) Strict convexity \(\Rightarrow\) Convexity
Strong convexity \(\Rightarrow\) Coercivity
2.2.3.3. Convexity-preserving rules#
To quickly recognize a convex function, it is often easier to verify that a matehatical expression contains only “convexity preserving” operations. Here is a quick overview of such operations.
\(g({\bf x}) = w_1 f_1({\bf x}) + \dots + w_n f_n({\bf x})\) is convex if so are \(f_1,\dots, f_n\) and \(w_1, \dots, w_n \ge 0\).
\(g({\bf x}) = \max\{f_1({\bf x}), \dots, f_n({\bf x})\}\) is convex if so are \(f_1,\dots, f_n\).
\(g({\bf x}) = f(A{\bf x}+{\bf b})\) is convex if so is \(f\), with \(A\in\mathbb{R}^{M\times N}\) and \({\bf b}\in\mathbb{R}^{M}\).
\(g({\bf x},t) = t \, f(\frac{ {\bf x} }{t})\) is convex if so is \(f\), for every \(\frac{ {\bf x} }{t}\in {\rm dom}(f)\) and \(t>0\).
\(g({\bf x}) = h\big(f({\bf x})\big)\) is convex if so are \(f\) and \(h\), and \(h\) is also non-decreasing over the image of \(f\).
\(g({\bf x}) = h\big(f({\bf x})\big)\) is convex if \(f\) is concave, and \(h\) is convex and non-increasing over the image of \(f\).