5.4.9. Positive L2-ball#
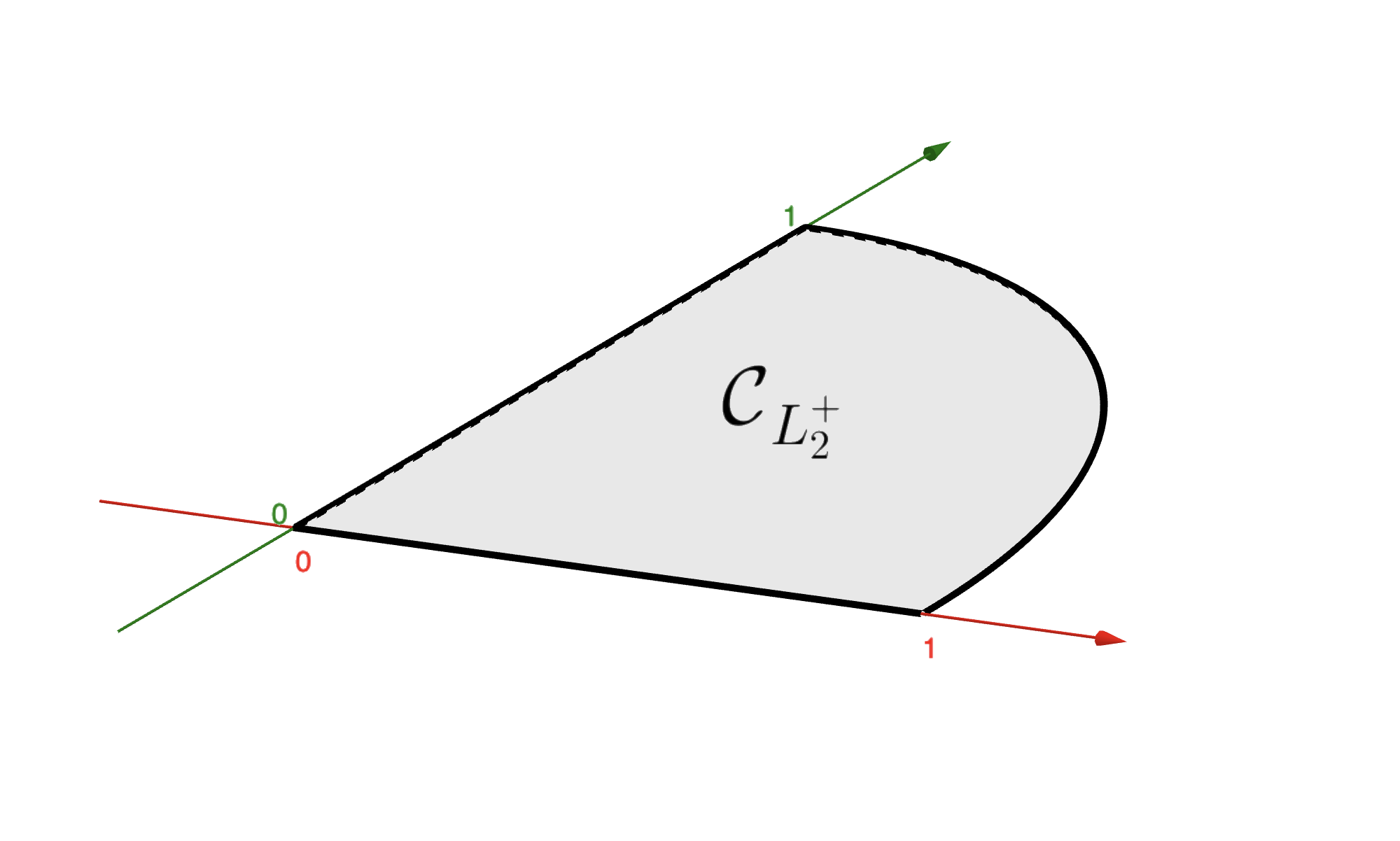
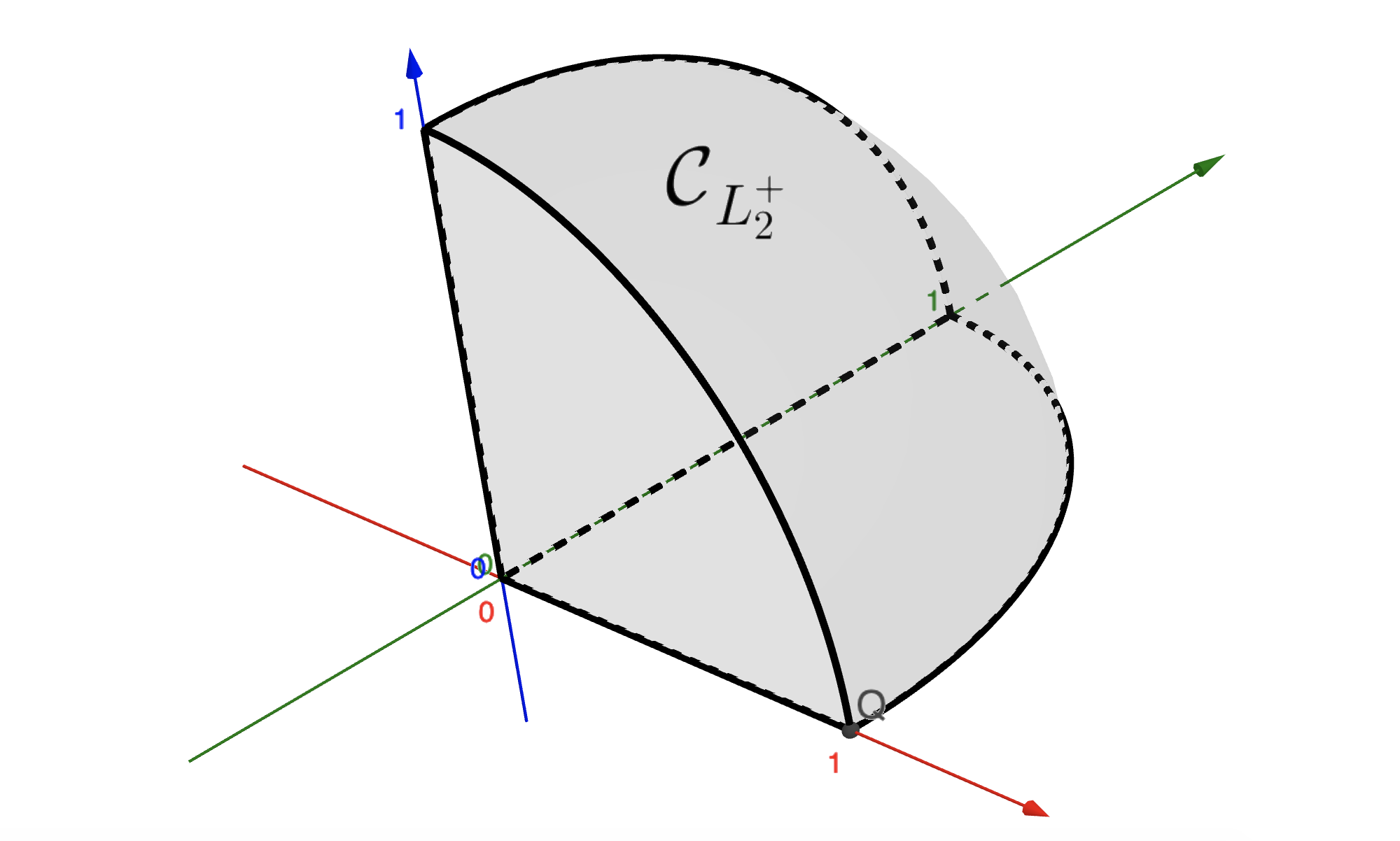
For a given scalar \(\xi \ge 0\), the positive L2-ball is a convex constraint defined as
where \(\|{\bf w}\|_2 = \sqrt{w_1^2+\dots+w_N^2}\) is the L2-norm. The condition \(\xi \ge 0\) is required for this subset to be nonempty. The figure below shows how this constraint looks like in \(\mathbb{R}^{2}\) or in \(\mathbb{R}^{3}\).
5.4.9.1. Constrained optimization#
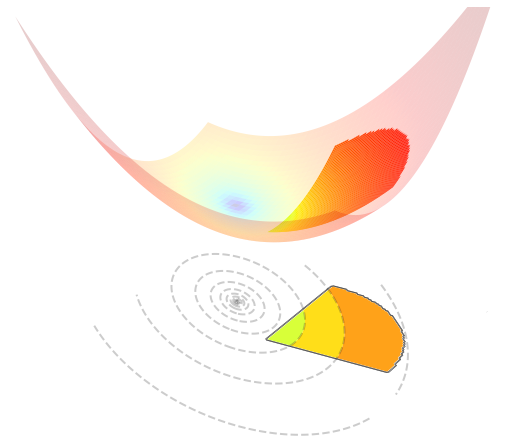
Optimizing a function \(J({\bf w})\) subject to the positive L2-ball constraint can be expressed as
The figure below visualizes such an optimization problem in \(\mathbb{R}^{2}\).
5.4.9.2. Orthogonal projection#
The projection of a point \({\bf u}\in\mathbb{R}^{N}\) onto the positive L2-ball is the (unique) solution to the following problem
The solution can be computed as follows.
Projection onto the positive L2-ball
Note: \(\mathcal{C}_{L_2}\) denotes the standard L2-ball.
5.4.9.3. Implementation#
The python implementation is given below.
def project_l2plus(u, bound):
return project_l2ball(np.maximum(0, u), bound)
Here is an example of use.
u = np.array([-1, 2, -5, 3, 2])
p = project_l2plus(u, bound=5)