5.4.4. Half-space#
For a given vector \({\bf c}\in\mathbb{R}^N\) and scalar \(\eta\in\mathbb{R}\), the half-space is a linear constraint defined as
\[
\mathcal{C}_{\rm half} = \big\{
{\bf w} \in \mathbb{R}^{N} \;|\;
{\bf c}^\top {\bf w} \le \eta
\big\}.
\]
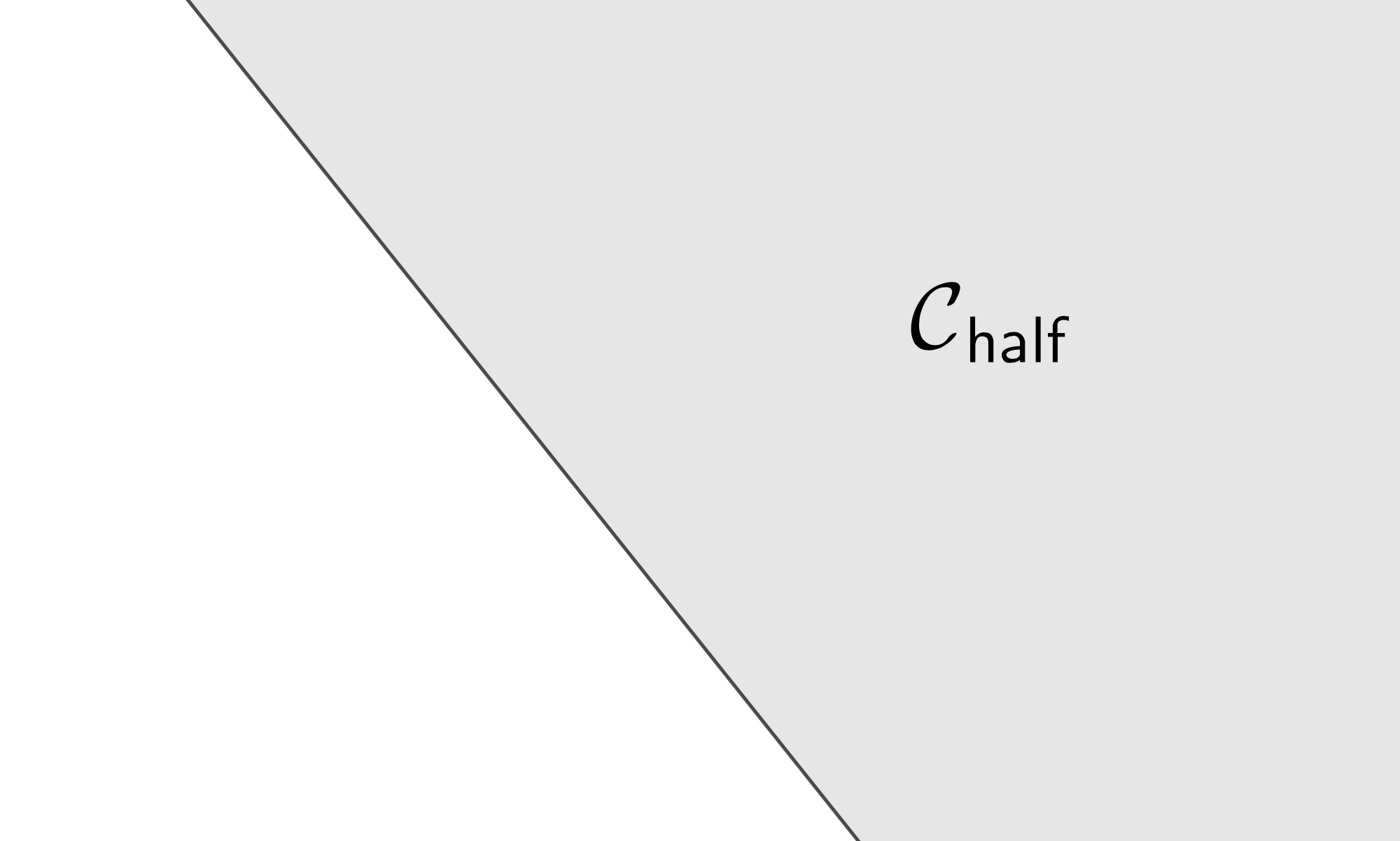
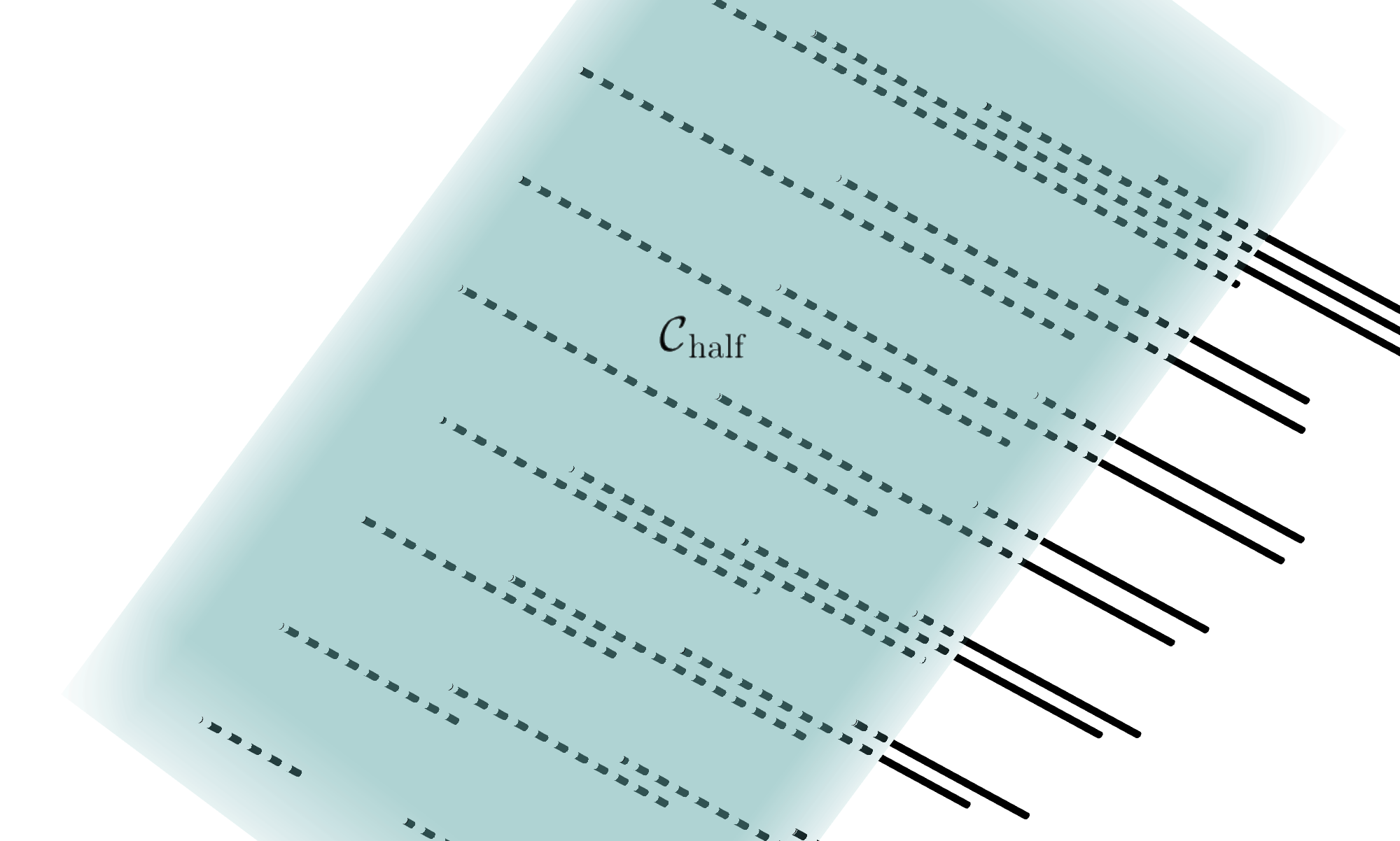
The figure below shows how this constraint looks like in \(\mathbb{R}^{2}\) or in \(\mathbb{R}^{3}\).
Half-space in 2D
Half-space in 3D
5.4.4.1. Constrained optimization#
Optimizing a function \(J({\bf w})\) over an half-space can be expressed as
\[
\operatorname*{minimize}_{\textbf{w}\in\mathbb{R}^N}\;\; J({\bf w}) \quad{\rm s.t.}\quad
{\bf c}^\top {\bf w} \le \eta.
\]
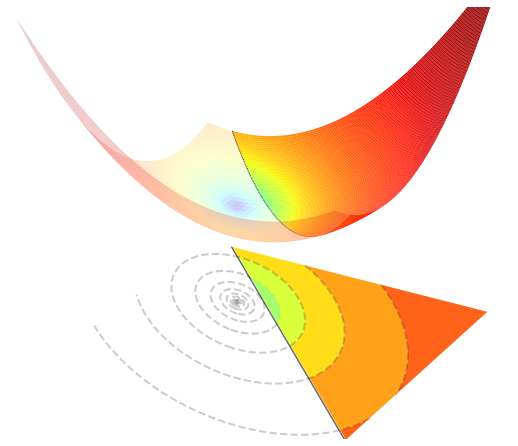
The figure below visualizes such an optimization problem in \(\mathbb{R}^{2}\).
5.4.4.2. Orthogonal projection#
The projection of a point \({\bf u}\in\mathbb{R}^{N}\) onto the half-space is the (unique) solution to the following problem
\[
\operatorname*{minimize}_{{\bf w}\in\mathbb{R}^N}\;\; \|{\bf w}-{\bf u}\|^2
\quad{\rm s.t.}\quad
{\bf c}^\top {\bf w} \le \eta.
\]
The solution can be analytically computed as follows.
Projection onto the half-space
\[\begin{split}
\mathcal{P}_{\mathcal{C}_{\rm half}}({\bf u})
=
\begin{cases}
{\bf u} &\textrm{if ${\bf c}^\top {\bf u} \le \eta$}\\
{\bf u} + {\bf c} \, \Big(\dfrac{\eta - {\bf c}^\top {\bf u} }{\|{\bf c}\|_2^2}\Big) &\textrm{otherwise}
\end{cases}
\end{split}\]
5.4.4.3. Implementation#
The python implementation is given below.
def project_half(u, coefs, bound):
s = np.minimum(0, bound - np.sum(u * coefs)) / np.sum(coefs**2)
p = u + s * coefs
return p
Here is an example of use.
u = np.array([-1, 2, 4])
coefs = np.array([1, 2, 1])
bound = 1
p = project_half(u, coefs, bound)