5.4.2. Affine space#
For a given matrix \(A \in \mathbb{R}^{K \times N}\) and vector \({\bf b} \in \mathbb{R}^K\), the affine space is a linear constraint defined as
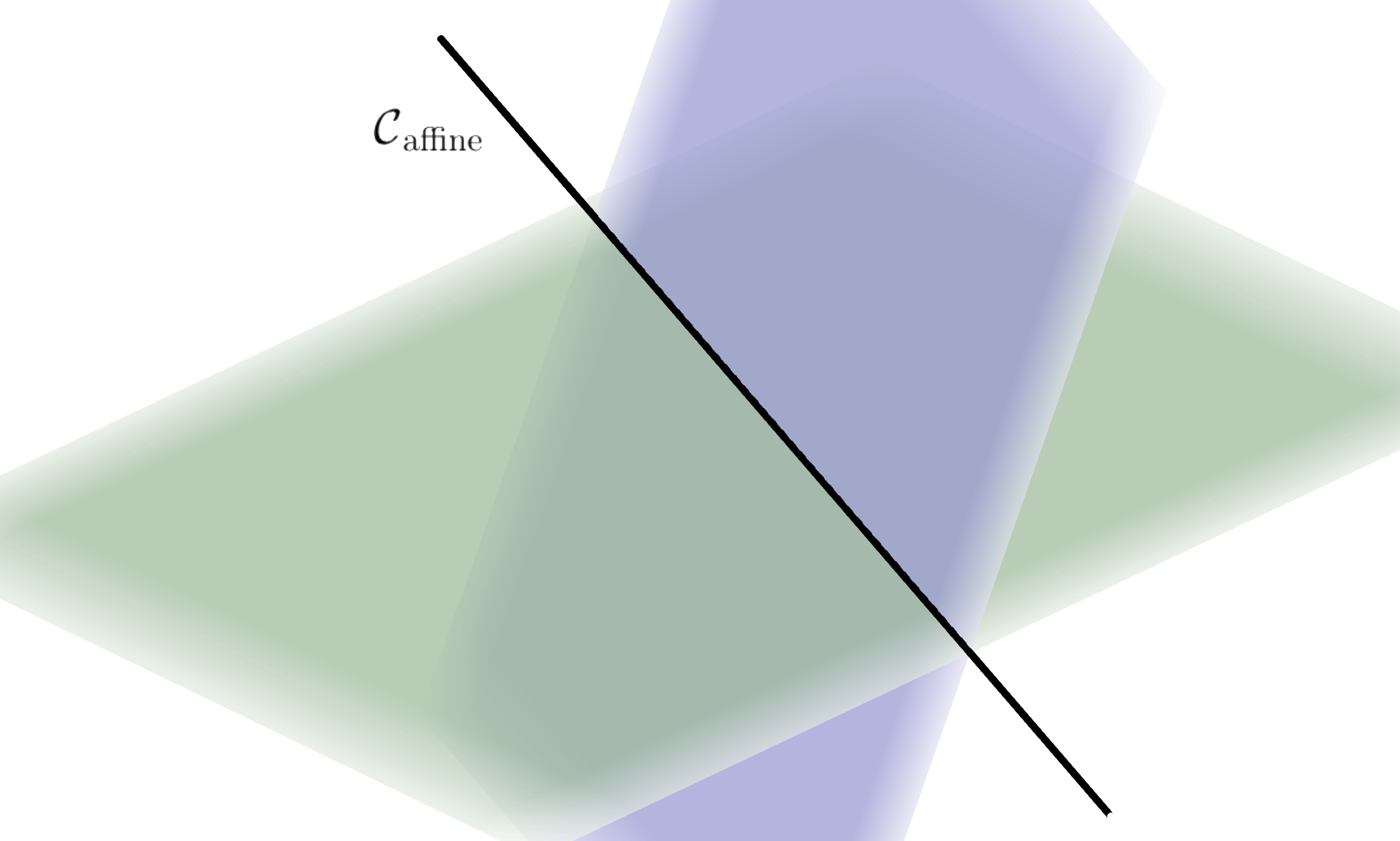
The conditions \(K \le N\), \({\rm rank}(A)=K\), and \({\bf b}\in{\rm ran}(A)\) are required for this subset to be nonempty. Simply put, \(A\) must have linearly independent rows, and \({\bf b}\) must belong to its column space. Note that an affine space may or may not be a vector space, depending on whether it contains the zero vector. The figure below shows several affine constraints in \(\mathbb{R}^{3}\).
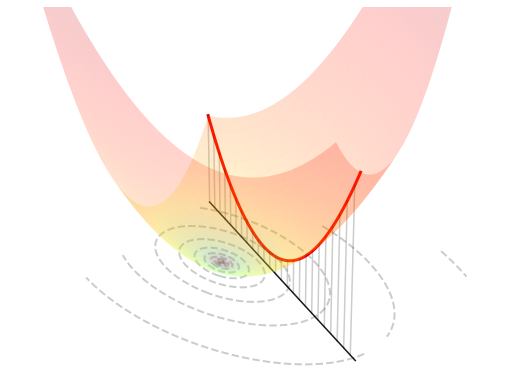
5.4.2.1. Constrained optimization#
Optimizing a function \(J({\bf w})\) over an affine space can be expressed as
The figure below visualizes such an optimization problem in \(\mathbb{R}^{2}\).
5.4.2.2. Orthogonal projection#
The projection of a point \({\bf u}\in\mathbb{R}^{N}\) onto the affine space is the (unique) solution to the problem
The solution can be analytically computed as follows.
Projection onto the affine space
5.4.2.3. Implementation#
The python implementation is given below.
def project_affine(u, A, b):
assert np.linalg.matrix_rank(A) == A.shape[0], "The matrix must have full row rank"
s = np.linalg.solve(A @ A.T, A @ u - b)
p = u - A.T @ s
return p
Here is an example of use.
u = np.array([-1, 2, 4])
A = np.array([[1, -1, 0],
[0, 1, -1]])
b = np.array([1, -1])
p = project_affine(u, A, b)
5.4.2.4. Proof#
By using the Lagrange multipliers to remove the equality constraint, the projection onto the affine space is the (unique) solution to the following problem
Strong duality holds, because this is a convex problem with linear constraints. Hence, it can be equivalently rewritten as
Setting to zero the gradient w.r.t. \({\bf w}\), the inner minimization is solved by
Setting to zero the gradient w.r.t. \({\bf c}\), the outer maximization is attained by the vector \({\bf c}\) that solves the equation