5.4.10. Hypersphere#
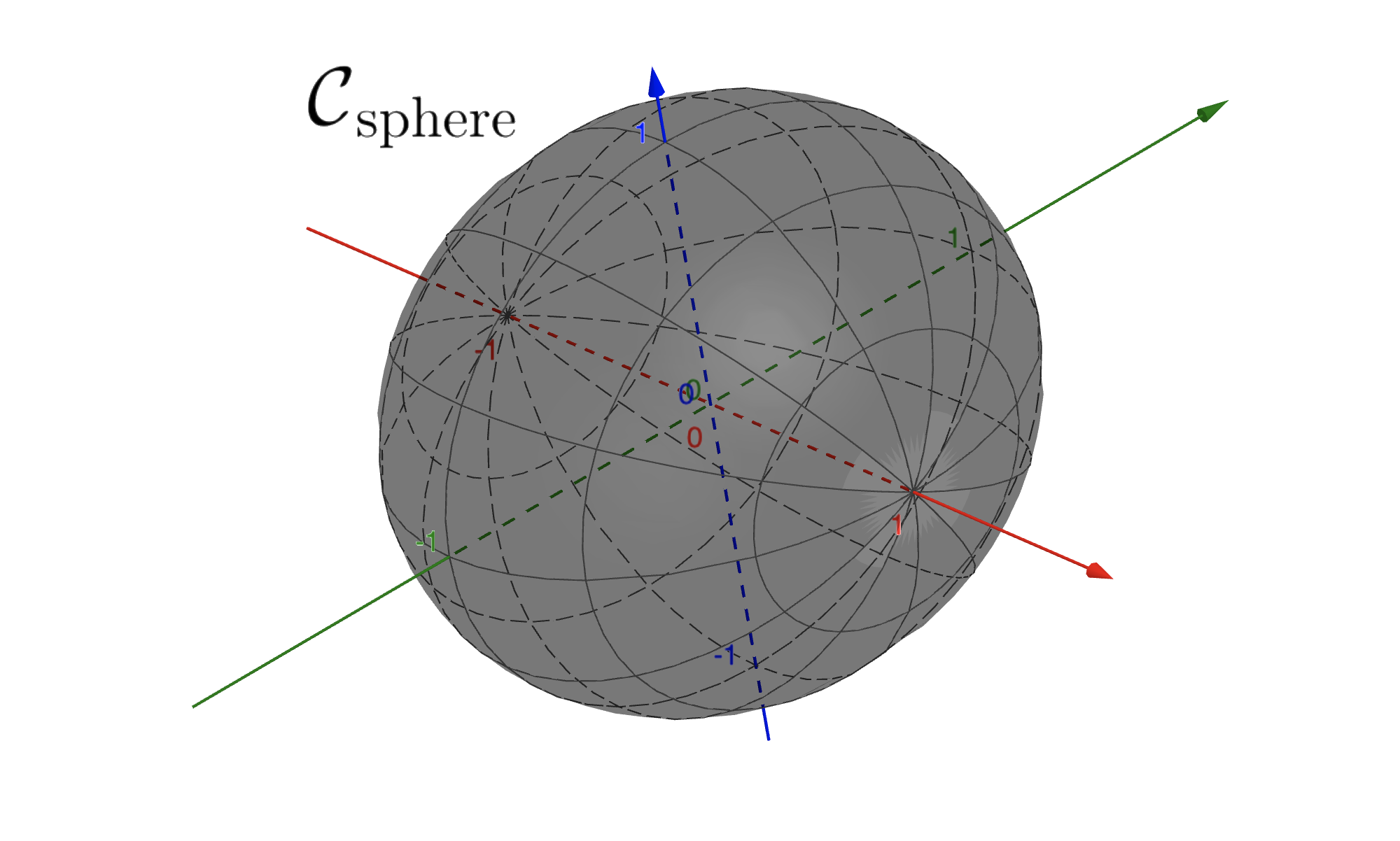
For a given scalar \(\xi \ge 0\), the hypersphere is a nonconvex constraint defined as
The condition \(\xi \ge 0\) allows this subset to be nonempty. The figure below shows how this constraint looks like in \(\mathbb{R}^{2}\) or in \(\mathbb{R}^{3}\).

5.4.10.1. Constrained optimization#
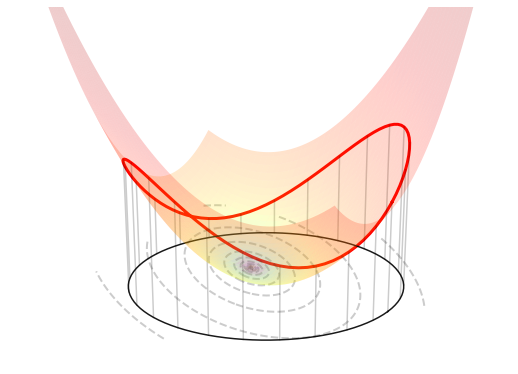
Optimizing a function \(J({\bf w})\) subject to the hyphersphere constraint can be expressed as
The figure below visualizes such an optimization problem in \(\mathbb{R}^{2}\).
5.4.10.2. Orthogonal projection#
The projection of a point \({\bf u}\in\mathbb{R}^{N}\) onto the hypersphere is one of the possible solutions to the following problem
The solution can be analytically computed as follows.
Projection onto the hypersphere
Note that the above expression is ill-defined when \({\bf u}={\bf 0}\). This stems from the fact that any point of the hypersphere is a valid projection of the zero vector. A possible convention is to set \(\mathcal{P}_{\mathcal{C}_{\rm sphere}}({\bf 0})=[\xi,0\dots,0]^\top\).
5.4.10.3. Implementation#
The python implementation is given below.
def project_sphere(u, bound):
assert bound >= 0, "The bound must be non-negative"
if np.linalg.norm(u) < 1e-16:
p = np.zeros(u.shape)
p[0] = bound
else:
p = u * bound / np.linalg.norm(u)
return p
Here is an example of use.
u = np.array([-1.2, 1.2])
p = project_sphere(u, bound=1)